




英威腾AX70控制器在视觉以太网通讯上的应用
发布时间:2022-08-02点击量: 1558
一、机器视觉
基于视觉的模块化搬运储存系统是一套微仿真实际自动化生产过程的装置,他将伺服技术、机械传动技术、气动技术、传感器技术、PLC控制及网络技术结合同一台设备上,重点突出了识别技术在工业领域的应用,体现了现在制造业生产过程的特征,可使用于各级各类不同层次的实际生产过程中,从而实现设备自动化,解放劳动力、提高工作效率。
二、集装箱卸货机器人运用机器视觉
由于疫情原因,某客户基于港口集装箱卸货需求开发一款卸货机器人,采用视觉拍照,+PLC控制器+驱动伺服机械臂的方案。

在机器视觉系统中,图像处理后的数据传输是十分重要的。由于视觉系统抓取数据量巨大,整体有上千条之多,采用传统的通讯方式传输数据受限,需要将数据打包多次后进行传输,难以满足系统数据实时性的要求。
基于对客户作业工况的理解,英威腾为客户提供了简单可靠的实时通讯解决方案。
三、英威腾方案
1、整体方案介绍
1.1、在港口集装箱卸货机器人上,英威腾为客户提供了视觉上位机+英威腾AX70控制器+DA200伺服+VS触摸屏构成的整体解决方案。
1.2、视觉系统拍摄集装箱内整面箱子的画面,抓取每一个纸箱的数据,包括箱子长度,宽度,高度,纸箱相对于相机在空间中的坐标点X、Y、Z.并且将采集的纸箱数据传输给PLC来做下一步的数据处理。
1.3、PLC控制器采用英威腾AX70中型PLC,接收到视觉传输的纸箱数据后,再次进行数据优化,判定纸箱是否可以抓取,合并,纸箱位置以给后续控制使用。
每个纸箱有8个数据,每一次拍照纸箱数量最多可达100个,整体数据量比较庞大,为提高通讯效率,故采用TCP/IP通讯协议,将整体数据打包,由PLC一次性接收。
2、方案系统图
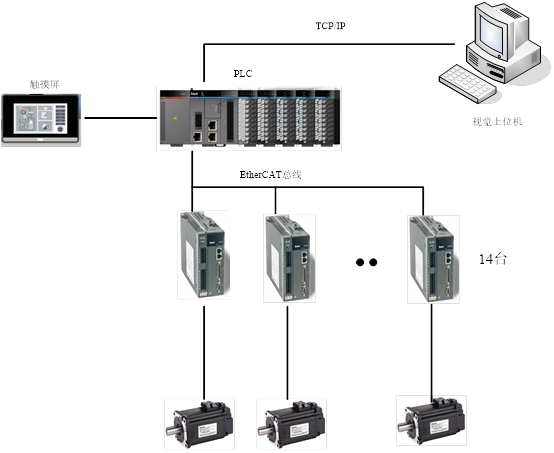
3、通讯部分介绍
针对视觉部分, 驱动器采用英威腾中型PLC AX70,通讯方式采用TCP/IP socket 协议,传输数据可以自定义,具有①传输数据时间短,性能高;②适用于客户端与服务器之间信息实时交互;③数据可以加密,数据安全性强等特点。
具体工作逻辑:PLC控制器系统,采用英威腾AX70中型PLC,接收到视觉传输的纸箱数据后,进行数据优化,判定纸箱是否可以抓取,合并,纸箱位置以给后续控制使用。
4、PLC以太网组态
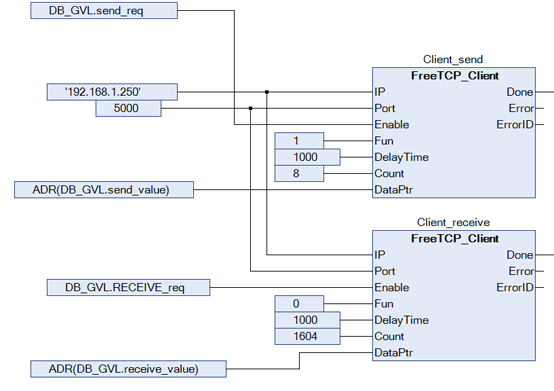
* 英威腾AX70高性价比控制器为客户端,提供视觉PC端为服务器。
* 基于codesys英威腾更具客户工艺封装专用库文件,FreeTCP_Client库。
* 在程序中调用FreeTCP_Client库,组态数据发送端,设置服务器端IP地址,端口号,将功能码fun设置为1,使能FreeTCP_Client为发送请求,Enable使能后将DataPtr指针指向的数据区数据发送给服务器。
* 在程序中调用FreeTCP_Client库,组态数据接收端,设置服务器端IP地址,端口号,将功能码fun设置为0,使能FreeTCP_Client为接收请求,从服务器接收到的数据存放在DataPtr指针指向的数据区。
四、英威腾方案优势
通过英威腾方案:
1、通讯性能提升:由于视觉系统抓取纸箱数据量较大,整体上千条数据,采用传统的通讯方式受传输字节限制,影响数据传输效率。现在由PC端将数据打包一次性传输完成,传输时间短(可达100兆/S)。
2、通讯更自由:服务器与客户端通讯数据可以自由定义,可以按照视觉与控制器双方自行约定进行数据传输,通讯更加自由灵活。
3、编程更简单:组态简单,仅需要配置服务器IP地址与端口,就可以完成TCP/IP通讯组态,节省了编程时间。
五、结束语
英威腾AX70在卸货机器人上应用,与视觉系统采用以太网通讯,采用TCP/IP通讯协议将数据打包传输,帮助客户提高传输效率,节约了整体动作时间。
相关案例
英威腾AX70总线EtherCAT控制器和GD350变频器 在片材机上的应用
片材机(挤出机)是按塑料材料特性,通过热熔、压力控制生产等宽薄、厚均匀的薄膜材料。塑料片材作为与日常生活息息相关的一种生活资料,需求量大。塑料片材机在塑料机械市场里,是一种关键的加工设备,与后端的吸塑机、打杯机、成型机等机组成型产业链,具有良好的市场前景。目前市面生产的片材机普遍存在关键压力控制不稳,导致片材薄厚不均影响后端设备产品质量的问题。
英威腾AX70系统方案在高速切纸机上的应用
本文主要介绍英威腾AX70系统解决方案在广东某客户切纸机上的应用,结果证明,设备的生产效率大幅提升,原材料的损耗大幅降低,设备的机械工艺及自动化水平得到很大提升,设备的维护变得简单易懂

