




英威腾Goodrive350变频器PROFINET通讯案例
发布时间:2022-11-02点击量: 6593
一. 系统组成:
GD350一台,PN通讯卡EC-TX509一块,S7-1200PLC一台,网线一根,装有博图V14软件的电脑
二. 安装:
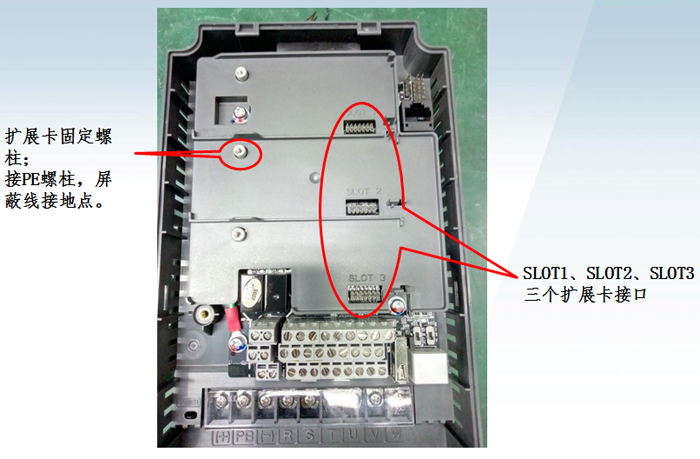
通讯卡可以安装在变频器SLOT1-3任意位置:,利用五类网络跳线将变频器通讯卡与PLC网口连接;
三. 变频器参数:
由于PN通讯比较简单易用,所以用于PN通讯建立连接的参数不多,设置P16.02-P16.09地址与网关就可以。其他的功能参数按需设置,比如启动命令来源,频率指令来源,PZD等。
四.PLC设置:
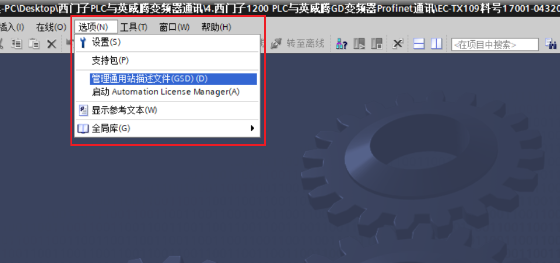
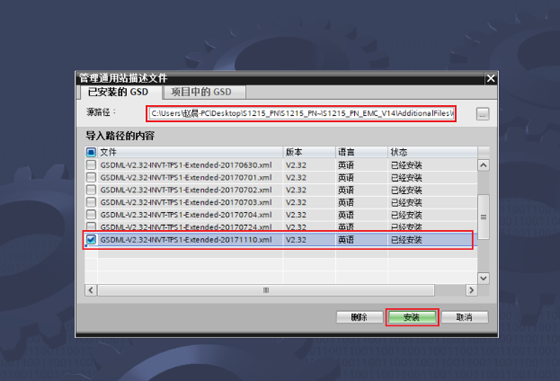
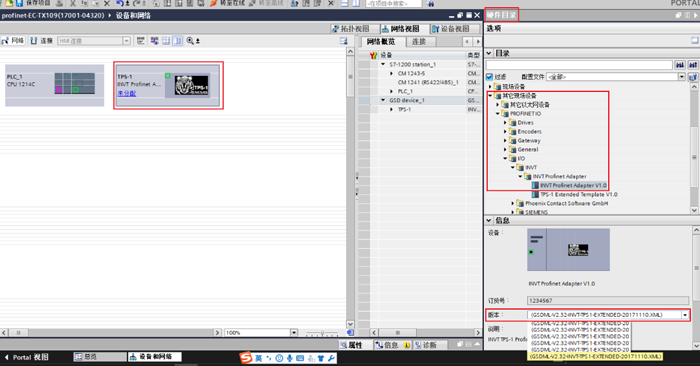
加载GSD配置文件;
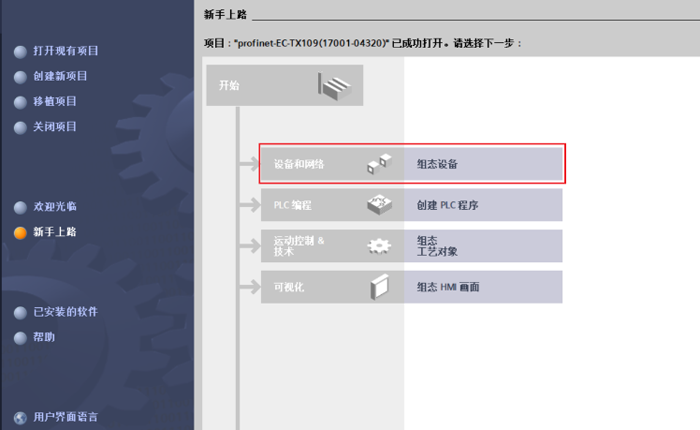
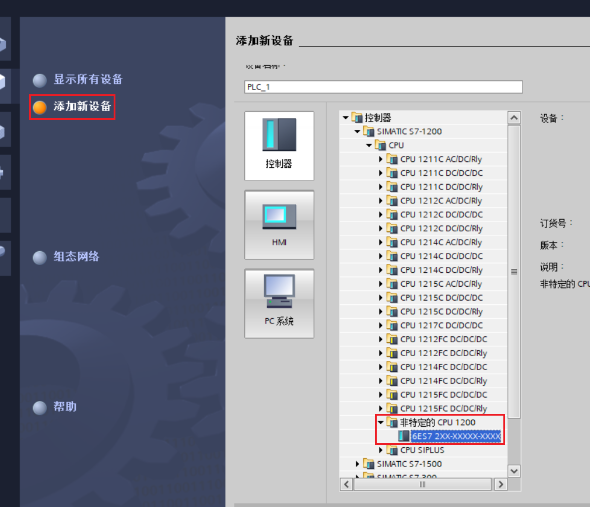
选择组态设备:
选择相应的CPU:
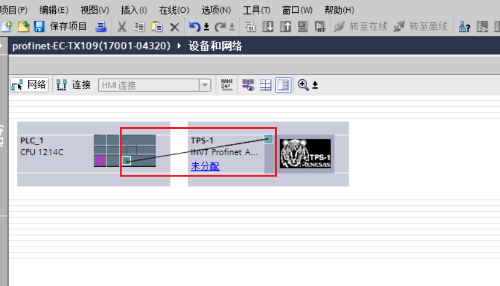
选择需要的GSD文件,添加一台变频器,连接PLC与变频器:
双击CPU或设备视图,在属性页配置CPU的以太网地址
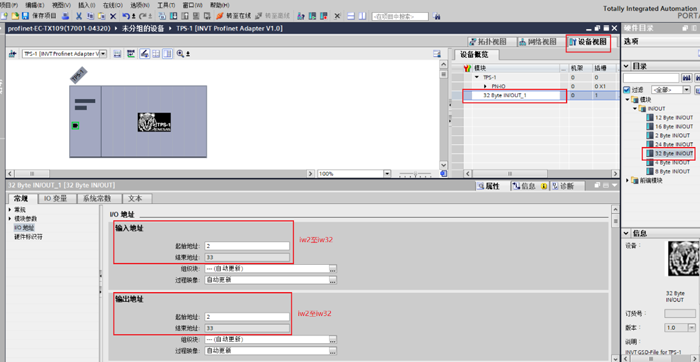
双击变频器或设备视图,从硬件路径添加模块,模块属性自动分配I/O地址,一般使用默认地址即可,即输入地址IW2至IW32,输出地址QW2至QW32
编译下载组态
电脑连接PLC转到在线,新建变量表,监控IW和QW
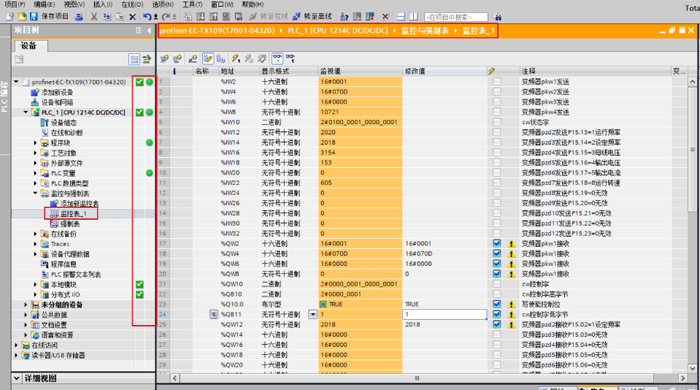
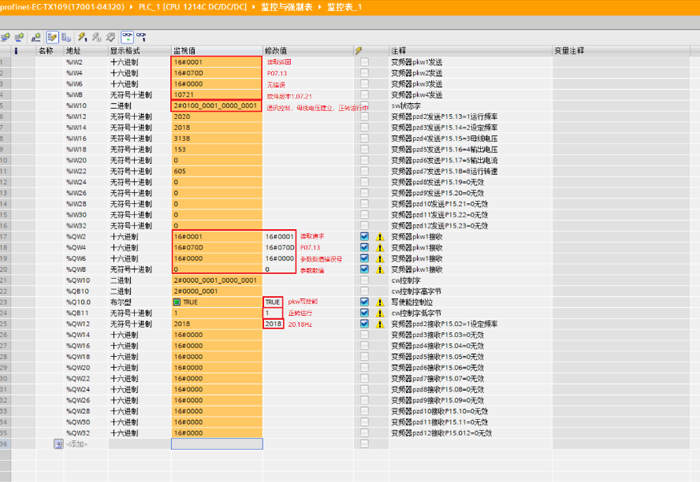
红框内的IW与QW为PKW1-4,可以通过修改PKW来监视或写入PZD中不涉及到的其他参数,但是一个通讯周期内只能对一个参数进行操作。
设置变频器P00.01=2通讯命令,P00.02=3通讯命令通道profinet,P00.06=13频率源profinet;监控表的PZD,SW,CW,PKW状态如图(具体SW与CW含义说明请见GD350PN通讯手册);
五. 结语:
GD350通讯操作方便使用,容易上手,速率高,稳定可靠。
功能码 | 名称 | 参数说明 | 设定范围 | 缺省值 |
P00.01 | 运行指令通道 | 0:键盘运行指令通道 | 0~2 | 0 |
1:端子运行指令通道 | ||||
2:通讯运行指令通道 | ||||
P00.02 | 通讯运行指令通道选择 | 0:MODBUS通讯通道 | 0~5 | 0 |
1:PROFIBUS通讯通道/CANopen通讯通道/Devicenet通讯通道 | ||||
2:以太网通讯通道 | ||||
3:EtherCat通讯通道/Profinet通讯通道 | ||||
4:PLC可编程卡通信通道 | ||||
5:无线通信卡通信通道 | ||||
注:1、2、3、4、5为扩展功能,需插卡才能使用。 | ||||
P00.06 | A频率指令选择 | 0:键盘数字设定 | 0~15 | 0 |
1~8:保留 | ||||
9:PROFIBUS/CANopen/DeviceNET通讯设定 | ||||
10:以太网通讯设定 | ||||
11~12:保留 | ||||
13:EtherCat /Profinet通讯设定 | ||||
P00.07 | B频率指令选择 | 14~15:保留 | 0~15 | 2 |
P03.11 | 转矩设定方式选择 | 0~1:键盘设定转矩 | 0~12 | 0 |
2~7:保留 | ||||
8:PROFIBUS/CANopen/DeviceNET通讯设定转矩 | ||||
9:以太网通讯设定转矩 | ||||
10:保留 | ||||
11:EtherCat /Profinet通讯设定 | ||||
12:保留 | ||||
P03.14 | 转矩控制正转上限频率设定源选择 | 0:键盘设定上限频率(P03.16) | 0~12 | 0 |
1~6:保留 | ||||
7:PROFIBUS/CANopen/DeviceNET通讯设定上限频率 | ||||
8:以太网通讯设定上限频率 | ||||
9:保留 | ||||
10:EtherCat /Profinet通讯设定 | ||||
11~12:保留 | ||||
P03.15 | 转矩控制反转上限频率设定源选择 | 0:键盘设定上限频率(P03.17) | 0~12 | 0 |
1~6:保留 | ||||
7:PROFIBUS/CANopen/DeviceNET通讯设定上限频率 | ||||
8:以太网通讯设定上限频率 | ||||
9:保留 | ||||
10:EtherCat /Profinet通讯设定 | ||||
11~12:保留 | ||||
P03.18 | 电动转矩上限设定源选择 | 0:键盘设定转矩上限(P03.20) | 0~11 | 0 |
1~5:保留 | ||||
6:PROFIBUS/CANopen/DeviceNET通讯设定转矩上限 | ||||
7:以太网通讯设定转矩上限 | ||||
8:保留 | ||||
9:EtherCat /Profinet通讯设定 | ||||
10~11:保留 | ||||
P03.19 | 制动转矩上限设定源选择 | 0:键盘设定转矩上限(P03.21) | 0~11 | 0 |
1~5:保留 | ||||
6:PROFIBUS/CANopen/DeviceNET通讯设定转矩上限 | ||||
7:以太网通讯设定转矩上限 | ||||
8:保留 | ||||
9:EtherCat /Profinet通讯设定 | ||||
10~11:保留 | ||||
P04.27 | 电压设定 | 0:键盘设定电压(设定由P04.28设定) | 0~13 | 0 |
通道选择 | 1~7:保留 | |||
8:PROFIBUS/CANopen/DeviceNET通讯设定电压 | ||||
9:以太网通讯设定电压 | ||||
10:保留 | ||||
11:EtherCat /Profinet通讯设定 | ||||
12~13:保留 | ||||
P06.01 | Y1输出选择 | 0:无效 | 0~63 | 0 |
1~23:保留 | ||||
24:PROFIBUS/CANopen/DeviceNET通讯虚拟端子输出 | ||||
25:以太网通讯虚拟端子输出 | ||||
P06.02 | HDO输出选择 | 26~33:保留 | 0~63 | 0 |
P06.03 | 继电器RO1 | 34:EtherCat/Profinet虚拟端子输出 | 0~63 | 1 |
输出选择 | 35~63:保留 | |||
P06.04 | 继电器RO2 | 0~63 | 5 | |
输出选择 | ||||
P06.14 | AO1输出选择 | 0:运行频率 | 0~47 | 0 |
1~15:保留 | ||||
16:PROFIBUS/CANopen/DeviceNET通讯设定值1 | ||||
17:PROFIBUS/CANopen/DeviceNET通讯设定值2 | ||||
18:以太网通讯设定值1 | ||||
19:以太网通讯设定值2 | ||||
20:保留 | ||||
21:EtherCat/Profinet通讯设定值1 | ||||
22~26:保留 | ||||
27: EtherCat/Profinet通讯设定值2 | ||||
P06.16 | HDO高速脉冲输出选择 | 28~47:保留 | 0~47 | 0 |
P07.27 | 当前故障类型 | 0:无故障 | / | / |
29:Profibus通讯故障(E-DP) | ||||
30:以太网通信故障(E-NET) | ||||
31:CANopen通信故障(E-CAN) | ||||
60:卡槽1卡识别失败(F1-Er) | ||||
61:卡槽2卡识别失败(F2-Er) | ||||
62:卡槽3卡识别失败(F3-Er) | ||||
63:卡槽1卡通信故障(C1-Er) | ||||
64:卡槽2卡通信故障(C2-Er) | ||||
65:卡槽3卡通信故障(C3-Er) | ||||
66:EtherCat通信故障(E-CAT) | ||||
67:Bacnet通信故障(E-BAC) | ||||
68:DeviceNet通信故障(E-DEV) | ||||
69:主从同步CAN从机故障(S-Err) | ||||
P07.28 | 前1次故障类型 | / | / | / |
P07.29 | 前2次故障类型 | / | / | / |
P07.30 | 前3次故障类型 | / | / | / |
P07.31 | 前4次���障类型 | / | / | / |
P07.32 | 前5次故障类型 | / | / | / |
P08.31 | 电机1和电机2 | 0x00~0x14 | 00~14 | 0x00 |
切换通道选择 | LED个位:切换通道选择 | |||
0:端子切换 | ||||
1:MODBUS通讯切换 | ||||
2:PROFIBUS/CANopen/DeviceNET通讯切换 | ||||
3:以太网通讯切换 | ||||
4:EtherCat/Profinet通讯切换 | ||||
LED十位:运行中切换使能选择 | ||||
0:运行中不可切换 | ||||
1:运行中可切换 | ||||
P09.00 | PID给定源选择 | 0:键盘定数字给定(P09.01) | 0~12 | 0 |
1~6:保留 | ||||
7:PROFIBUS/CANopen/DevicneNET通讯设定 | ||||
8:以太网通讯设定 | ||||
9:保留 | ||||
10:EtherCat /Profinet通讯设定 | ||||
11~12:保留 | ||||
P09.02 | PID反馈源选择 | 0:模拟通道AI1反馈 | 0~10 | 0 |
1~4:保留 | ||||
5:PROFIBUS/CANopen/DevicneNET通讯设定 | ||||
6:以太网通讯设定 | ||||
7:保留 | ||||
8:EtherCat /Profinet通讯设定 | ||||
9~10:保留 | ||||
P15.01 | 模块地址 | 0~127 | 0~127 | 2 |
P15.02 | PZD2接收 | 0:无效 | 0~31 | 0 |
1:设定频率(0~Fmax(单位:0.01Hz)) | ||||
2:PID给定,范围(0~1000,1000对应100.0%) | ||||
3:PID反馈,范围(0~1000,1000对应100.0%) | ||||
4:转矩设定值(-3000~3000,1000对应100.0%电机额定电流) | ||||
5:正转上限频率设定值(0~Fmax(单位:0.01Hz)) | ||||
对话 | ||||
留言 | ||||
监控 | ||||
记录 | ||||
客户 | ||||
报表 | ||||
日志 | ||||
P15.03 | PZD3接收 | 11:电压设定值(V/F分离专用) | 0~31 | 0 |
P15.04 | PZD4接收 | (0~1000,1000对应100.0%电机额定电压) | 0~31 | 0 |
P15.05 | PZD5接收 | 12:AO1 输出设定值1(-1000~1000,1000对应100.0%) | 0~31 | 0 |
P15.06 | PZD6接收 | 13:AO2 输出设定值2(-1000~1000,1000对应100.0%) | 0~31 | 0 |
P15.07 | PZD7接收 | 14:位置给定高位(有符号数) | 0~31 | 0 |
P15.08 | PZD8接收 | 15:位置给定低位(无符号数) | 0~31 | 0 |
P15.09 | PZD9接收 | 16:位置反馈高位(有符号数) | 0~31 | 0 |
P15.10 | PZD10接收 | 17:位置反馈低位(无符号数) | 0~31 | 0 |
P15.11 | PZD11接收 | 18:位置反馈设定标志(先写1再写0,则位置反馈才可以设定) | 0~31 | 0 |
P15.12 | PZD12接收 | 19~31:保留 | 0~31 | 0 |
P15.13 | PZD2发送 | 0:无效 | 0~31 | 0 |
1:运行频率(*100,Hz) | ||||
2:设定频率(*100,Hz) | ||||
3:母线电压(*10,V) | ||||
4:输出电压(*1,V) | ||||
5:输出电流(*10,A) | ||||
6:输出转矩实际值(*10,%) | ||||
7:输出功率实际值(*10,%) | ||||
8:运行转速(*1,RPM) | ||||
9:运行线速度(*1,m/s) | ||||
10:斜坡给定频率 | ||||
11:故障代码 | ||||
12:AI1值(*100,V) | ||||
13:AI2值(*100,V) | ||||
14:AI3值(*100,V) | ||||
15:HDIA频率植(*100,kHz) | ||||
16:端子输入状态 | ||||
17:端子输出状态 | ||||
P15.14 | PZD3发送 | 18:PID给定(*100,%) | 0~31 | 0 |
P15.15 | PZD4发送 | 19:PID反馈(*100,%) | 0~31 | 0 |
P15.16 | PZD5发送 | 20:电机额定转矩 | 0~31 | 0 |
P15.17 | PZD6发送 | 21:位置给定高位(有符号数) | 0~31 | 0 |
P15.18 | PZD7发送 | 22:位置给定低位(无符号数) | 0~31 | 0 |
P15.19 | PZD8发送 | 23:位置反馈高位(有符号数) | 0~31 | 0 |
P15.20 | PZD9发送 | 24:位置反馈低位(无符号数) | 0~31 | 0 |
P15.21 | PZD10发送 | 25:状态字 | 0~31 | 0 |
P15.22 | PZD11发送 | 26:HDIB频率植(*100,kHz) | 0~31 | 0 |
P15.23 | PZD12发送 | 27~31:保留 | 0~31 | 0 |
P15.24 | PZD发送用 | 0~65535 | 0~65535 | 0 |
临时变量1 | ||||
P15.25 | DP通信超时时间 | 0.0(无效)~300.0s | 0.0~300.0 | 0.0s |
P15.26 | CANOPEN通信超时时间 | 0.0(无效)~300.0s | 0.0~300.0 | 0.0s |
P15.27 | CANopen通讯 | 0:1000k bps | 0~7 | 0 |
波特率 | 1:800k bps | |||
2:500k bps | ||||
3:250k bps | ||||
4:125k bps | ||||
5:100k bps | ||||
6:50k bps | ||||
7:20k bps | ||||
P15.28 | CAN通讯地址 | 0~127 | 0~127 | 1 |
P15.29 | CAN波特率选择 | 0:50Kbps | 0~4 | 1 |
1:125Kbps | ||||
2:250Kbps | ||||
3:500Kbps | ||||
4:1M bps | ||||
P15.30 | CAN通信超时时间 | 0.0(无效)~300.0s | 0.0~300.0 | 0.0s |
P15.31 | DeviceNET通信超时时间 | 0.0(无效)~300.0s | 0.0~300.0 | 0.0s |
P15.32 | 显示节点波特率 | 0 | 0 | 0 |
P15.33 | 轮询使能 | 0~1 | 0~1 | 1 |
P15.34 | 轮询输出实例号 | 19:INVT变频器输出 | 19~27 | 19 |
20:ODVA基本速度控制输出 | ||||
21:ODVA扩展速度控制输出 | ||||
22:ODVA速度和力矩控制输出 | ||||
23:ODVA扩展速度和力矩控制输出 | ||||
24:INVT基本速度控制输出 | ||||
25:INVT扩展速度控制输出 | ||||
26:INVT速度和力矩控制输出 | ||||
27:INVT扩展速度和力矩控制输出 | ||||
P15.35 | 轮询输入实例号 | 69:INVT变频器输入 | 69~77 | 69 |
70:ODVA基本速度控制输入 | ||||
71:ODVA扩展速度控制输入 | ||||
72:ODVA速度和力矩控制输入 | ||||
73:ODVA扩展速度和力矩控制输入 | ||||
74:INVT基本速度控制输入 | ||||
75:INVT扩展速度控制输入 | ||||
76:INVT速度和力矩控制输入 | ||||
77:INVT扩展速度和力矩控制输入 | ||||
P15.36 | 状态改变/周期使能 | 0~1 | 0~1 | 0 |
P15.37 | 状态改变/周期输出实例选择 | 19:INVT变频器输出 | 19~27 | 19 |
20:ODVA基本速度控制输出 | ||||
21:ODVA扩展速度控制输出 | ||||
22:ODVA速度和力矩控制输出 | ||||
23:ODVA扩展速度和力矩控制输出 | ||||
24:INVT基本速度控制输出 | ||||
25:INVT扩展速度控制输出 | ||||
26:INVT速度和力矩控制输出 | ||||
27:INVT扩展速度和力矩控制输出 | ||||
P15.38 | 状态改变/周期输入实例选择 | 69:INVT变频器输入 | 69~77 | 69 |
70:ODVA基本速度控制输入 | ||||
71:ODVA扩展速度控制输入 | ||||
72:ODVA速度和力矩控制输入 | ||||
73:ODVA扩展速度和力矩控制输入 | ||||
74:INVT基本速度控制输入 | ||||
75:INVT扩展速度控制输入 | ||||
76:INVT速度和力矩控制输入 | ||||
77:INVT扩展速度和力矩控制输入 | ||||
P15.39 | 组件19输出长度 | 8~32 | 8~32 | 32 |
P15.40 | 组件19输入长度 | 8~32 | 8~32 | 32 |
P15.41 | BACnet通讯 | 0:选择P16.22(I_M服务)有效 | 0~1 | 0 |
方式选择 | 1:选择P15.42(设置BACnet_MSTP的波特率)有效 | |||
P15.42 | BACnet_MSTP | 0~5 | 0~5 | 0 |
的波特率 | ||||
P15.43~ P15.69 | 保留 | |||
P16.01 | 以太网通讯速度设定 | 0:自适应 | 0~4 | 0 |
1:100M全双工 | ||||
2:100M半双工 | ||||
3:10M全双工 | ||||
4:10M半双工 | ||||
P16.02 | IP地址1 | 0~255 | 0~255 | 192 |
P16.03 | IP地址2 | 0~255 | 0~255 | 168 |
P16.04 | IP地址3 | 0~255 | 0~255 | 0 |
P16.05 | IP地址4 | 0~255 | 0~255 | 1 |
P16.06 | 子网掩码1 | 0~255 | 0~255 | 255 |
P16.07 | 子网掩码2 | 0~255 | 0~255 | 255 |
P16.08 | 子网掩码3 | 0~255 | 0~255 | 255 |
P16.09 | 子网掩码4 | 0~255 | 0~255 | 0 |
P16.10 | 网关1 | 0~255 | 0~255 | 192 |
P16.11 | 网关2 | 0~255 | 0~255 | 168 |
P16.12 | 网关3 | 0~255 | 0~255 | 1 |
P16.13 | 网关4 | 0~255 | 0~255 | 1 |
P16.14 | 以太网监控 | 0x0000~0xFFFF | 0000~FFFF | 0x0000 |
变量地址1 | ||||
P16.15 | 以太网监控 | 0x0000~0xFFFF | 0000~FFFF | 0x0000 |
变量地址2 | ||||
P16.16 | 以太网监控 | 0x0000~0xFFFF | 0000~FFFF | 0x0000 |
变量地址3 | ||||
P16.17 | 以太网监控 | 0x0000~0xFFFF | 0000~FFFF | 0x0000 |
变量地址4 | ||||
P16.18 | 保留 | |||
P16.19 | EtherCAT | 0~4(0:250us,1:500us,2:1ms,3:2ms) | 0~4 | 2 |
同步周期 | ||||
P16.20 | BACnet | BACnet设备的独立编码(0~4194303) | 0~4194 | 0 |
设备编号高位 | ||||
P16.21 | BACnet | 0~999 | 1 | |
设备编号低位 | ||||
P16.22 | BACnet“I-Am” | 0:上电时发送 | 0~1 | 0 |
服务选择 | 1:不断发送 | |||
P16.23 | BACnet通信超时时间 | 0.0(无效)~300.0s | 0.0~300.0 | 0.0s |
P16.24 | 卡槽1扩展卡 | 0.0~600.0s | 0.0~600.00 | 0 |
识别时间 | 设置为0.0,则不检测识别故障 | |||
P16.25 | 卡槽2扩展卡 | 0.0~600.0s | 0.0~600.00 | 0 |
识别时间 | 设置为0.0,则不检测掉线故障 | |||
P16.26 | 卡槽3扩展卡 | 0.0~600.0s | 0.0~600.00 | 0 |
识别时间 | 设置为0.0,则不检测掉线故障 | |||
P16.27 | 卡槽1扩展卡 | 0.0~600.0s | 0.0~600.00 | 0 |
通信超时时间 | 设置为0.0,则不检测掉线故障 | |||
P16.28 | 卡槽2扩展卡 | 0.0~600.0s | 0.0~600.00 | 0 |
通信超时时间 | 设置为0.0,则不检测掉线故障 | |||
P16.29 | 卡槽3扩展卡 | 0.0~600.0s | 0.0~600.00 | 0 |
通信超时时间 | 设置为0.0,则不检测掉线故障 | |||
P16.30 | EtherCat通信超时时间 | 0.0(无效)~300.0s | 0.0~300.0 | 0.0s |
P16.31 | Profinet通信超时时间 | 0.0(无效)~300.0s | 0.0~300.0 | 0.0s |
P16.32 | PZD2接收 | 0:无效 | 0~31 | 0 |
1:设定频率(0~Fmax(单位:0.01Hz)) | ||||
2:PID给定,范围(0~1000,1000对应100.0%) | ||||
3:PID反馈,范围(0~1000,1000对应100.0%) | ||||
4:转矩设定值(-3000~3000,1000对应100.0%电机额定电流) | ||||
5:正转上限频率设定值(0~Fmax(单位:0.01Hz)) | ||||
6:反转上限频率设定值(0~Fmax(单位:0.01Hz)) | ||||
7:电动转矩上限转矩(0~3000,1000对应100.0%电机额定电流) | ||||
8:制动转矩上限转矩(0~3000,1000对应100.0%电机额定电流) | ||||
9:虚拟输入端子命令,范围:0x000~0x3FF(依次对应S8\S7\S6\S5 | ||||
HDIB\HDIA\S4\S3\S2\S1 | ||||
10:虚拟输出端子命令,范围:0x00~0x0F | ||||
(依次对应RO2\RO1\HDO\Y1) | ||||
P16.33 | PZD3接收 | 11:电压设定值(V/F分离专用) | 0~31 | 0 |
P16.34 | PZD4接收 | (0~1000,1000对应100.0%电机额定电压) | 0~31 | 0 |
P16.35 | PZD5接收 | 12:AO1 输出设定值1(-1000~1000,1000对应100.0%) | 0~31 | 0 |
P16.36 | PZD6接收 | 13:AO2 输出设定值2(-1000~1000,1000对应100.0%) | 0~31 | 0 |
P16.37 | PZD7接收 | 14:位置给定高位(有符号数) | 0~31 | 0 |
P16.38 | PZD8接收 | 15:位置给定低位(无符号数) | 0~31 | 0 |
P16.39 | PZD9接收 | 16:位置反馈高位(有符号数) | 0~31 | 0 |
P16.40 | PZD10接收 | 17:位置反馈低位(无符号数) | 0~31 | 0 |
P16.41 | PZD11接收 | 18:位置反馈设定标志(先写1再写0,则位置反馈才可以设定) | 0~31 | 0 |
P16.42 | PZD12接收 | 19~31:保留 | 0~31 | 0 |
P16.43 | PZD2发送 | 0:无效 | 0~31 | 0 |
1:运行频率(*100,Hz) | ||||
2:设定频率(*100,Hz) | ||||
3:母线电压(*10,V) | ||||
4:输出电压(*1,V) | ||||
5:输出电流(*10,A) | ||||
6:输出转矩实际值(*10,%) | ||||
7:输出功率实际值(*10,%) | ||||
8:运行转速(*1,RPM) | ||||
9:运行线速度(*1,m/s) | ||||
10:斜坡给定频率 | ||||
11:故障代码 | ||||
12:AI1值(*100,V) | ||||
13:AI2值(*100,V) | ||||
14:AI3值(*100,V) | ||||
15:HDIA频率植(*100,kHz) | ||||
16:端子输入状态 | ||||
17:端子输出状态 | ||||
P16.44 | PZD3发送 | 18:PID给定(*100,%) | 0~31 | 0 |
P16.45 | PZD4发送 | 19:PID反馈(*100,%) | 0~31 | 0 |
P16.46 | PZD5发送 | 20:电机额定转矩 | 0~31 | 0 |
P16.47 | PZD6发送 | 21:位置给定高位(有符号数) | 0~31 | 0 |
P16.48 | PZD7发送 | 22:位置给定低位(无符号数) | 0~31 | 0 |
P16.49 | PZD8发送 | 23:位置反馈高位(有符号数) | 0~31 | 0 |
P16.50 | PZD9发送 | 24:位置反馈低位(无符号数) | 0~31 | 0 |
P16.51 | PZD10发送 | 25:状态字 | 0~31 | 0 |
P16.52 | PZD11发送 | 26:HDIB频率植(*100,kHz) | 0~31 | 0 |
P16.53 | PZD12发送 | 27~31:保留 | 0~31 | 0 |
相关案例
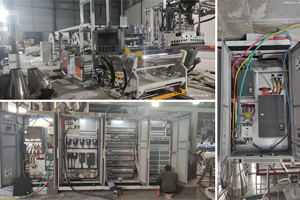
英威腾AX70总线EtherCAT控制器和GD350变频器 在片材机上的应用
片材机(挤出机)是按塑料材料特性,通过热熔、压力控制生产等宽薄、厚均匀的薄膜材料。塑料片材作为与日常生活息息相关的一种生活资料,需求量大。塑料片材机在塑料机械市场里,是一种关键的加工设备,与后端的吸塑机、打杯机、成型机等机组成型产业链,具有良好的市场前景。目前市面生产的片材机普遍存在关键压力控制不稳,导致片材薄厚不均影响后端设备产品质量的问题。

英威腾GD350系列Profinet总线通讯在意大利成功应用
在位于意大利西北部的亚历山德里亚 (Alessandria),有一家意大利知名的食品生产企业,年产量达为36300吨。在该企业特殊面包生产线上,英威腾实现了180台GD350系列变频器通过PROFINET组网连接,驱动其传送设备。通过使用GD350变频器和PROFINET总线通讯卡进行批量组网,产品易于调试、维护。生产效率较之前的提升了15%,掉线率大大降低。
